Математическое моделирование процессов в канале МГД-устройства с коническим осесимметричным каналом
Аннотация
Работа посвящена математическому моделированию процессов в канале МГД-устройства с конической осесимметричной формой канала. Сформулированы допущения, принимаемые при моделировании. Проведено математическое описание исследуемого объекта, в ходе которого определены уравнения составляющих плотности тока, магнитного поля и электромагнитных сил в конической части канала рассматриваемого устройства. Адекватность разработанной модели подтверждается результатами компьютерного моделирования процессов в канале устройства. Представлены выводы о применимости результатов данной работы.
Ключевые слова: МГД-устройство, конический осесимметричный канал, плотность тока в канале, математическая модель, электромагнитная сила
В настоящее время имеется большой задел в области исследований кондукционный и индукционных МГД-машин с различной формой канала, например, плоские, цилиндрические, дисковые, коаксиальные, конические, винтовые, которые предназначены для использования в самых разных деятельности человека, начиная с металлургии и заканчивая нетрадиционной энергетикой, морским транспортом [1, 2]. В то же время, процессы в канале конической формы является мало исследованным, и встречается в работах, посвященных электромагнитным преобразователям с коническим ротором [3], индукционным МГД-каналам конической формы во внешнем пульсирующем магнитном поле [4], и отсутствуют работы по кондукционным МГД-устройствам с конической осесимметричной формой канала. Это позволяет считать, что разработка математической модели процессов в канале МГД-устройства с конической осесимметричной формой канала является актуальной.
Процессы в данных устройствах описываются системой дифференциальных уравнений второго порядка в частных производных для электрических и магнитных полей и для движущейся проводящей вторичной среды. Решение этих уравнений с учетом конструкции канала, граничных условий, нелинейности свойств вещества канала является сложной задачей. При учете краевых явлений, возникающих в зоне контактов электродов с проводящей вторичной средой у кондукционных машин, эта задача усложняется еще больше. Поэтому при решении задачи целесообразно принять допущения, которые являются общепринятыми при исследовании МГД-машин [1, 5]:
- процессы в устройстве рассматриваются в электродинамическом приближении. Рабочее вещество канала представляет собой твердый недеформируемый проводник с конечной проводимостью. Это означает, что гидродинамические, и специфические магнитогидродинамические процессы, вызванные влиянием электромагнитного поля на характер движения частиц не учитываются;
- рабочее вещество канала является изотропной и его магнитная проницаемость µ= µ0;
- температура рабочего вещества канала является постоянной, поэтому ее влиянием на такие параметры, как электропроводность можно пренебречь;
- переходные процессы вблизи границы перехода «электрод – рабочее вещество» не рассматриваются;
- стенки канала электрически изолированы от рабочего вещества, которым он заполнен.
Для исследования составлена расчетная схема рассматриваемого устройства с коническим каналом, которая представлена на рис. 1. Особенностью устройства является то, что в канале имеется конический участок.
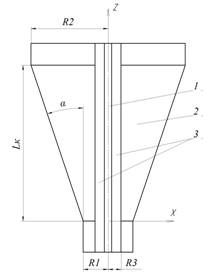
Рис. 1 – Расчетная схема МГД-устройства с коническим осесимметричным каналом.
1 – индуктор, 2 – канал, 3 – изолятор.
Коническая часть канала ограничен условными размерными обозначениями R1, R2, R3 и Lк.
Токи в цилиндрических активных частях канала текут в осевом направлении, которое совпадает с осью z системы координат. В то же время в конической части канала ток будет растекаться, и необходимо определить его распределение. Для этого принимается предположение, что вектора плотности тока в конической части канала будет иметь вид, как показано на рис. 2.
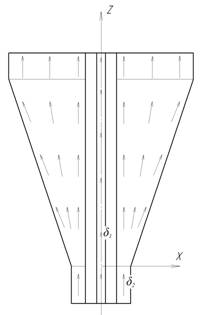
Рис. 2 – Распределение векторов плотности тока в индукторе δ1 и в канале δ2
Тогда в радиальном направлении в конической части канала угол наклона векторов плотности тока меняется от α до нуля.
Вектора плотности в индукторе δ1 и в канале δ2, в цилиндрической частях, имеют только одну (осевую) составляющую. В конической части канала вектор плотности тока ![]() в канале может быть разложен на осевую
в канале может быть разложен на осевую ![]() и радиальную
и радиальную ![]() составляющие (рис. 3).
составляющие (рис. 3).
При выражении ![]() через его составляющие получается
через его составляющие получается
![]()
где угол β - угол между векторами ![]() и
и ![]() . Может принимать значение от нуля до α.
. Может принимать значение от нуля до α.
![]()

Рис. 3 – Разложение на составляющие вектора плотности тока в конической части канала
Тогда согласно рис. 2 и 3, можно принять следующие условия:
1) проекция осевой составляющей плотности тока в канале на ось канала z неизменна;
2) проекция радиальной составляющей плотности тока в канале на ось r меняется в зависимости от угла β, который в свою очередь зависит от α.
С учетом первого условия, проекция на ось z осевой составляющей плотности тока в канале
![]() ,
,
где δ2 - модуль вектора плотности тока в канале.
Осевую составляющую вектора плотности тока δ2 в произвольной точке конической части канала можно определить согласно известной формуле
![]()
где I2 – ток в канале; St – функция изменения площади поперечного сечения в конической части канала от его длины.
Данная функция запишется следующим образом
![]() (1)
(1)
где k = tgα – тангенс угла наклона образующей прямой внешней стенки канала к оси z.
Осевая составляющая плотности тока в произвольной точке конической части канала
![]() (2)
(2)
По второму условию, проекция радиальной составляющей плотности тока в канале на радиальную ось
![]()
Радиальную составляющую плотности тока в канале можно определить, исходя из рис. 3 по следующему соотношению
![]()
Плотность тока в произвольной части канала будет определяться как
![]()
Граничные условия между каналом и индуктором таковы, что силовые линии магнитного поля, создаваемого током индуктора, будут пронизывать весь объем канала и по всей ее длине представляют собой концентрические окружности. При протекании тока в канале образуется собственное магнитное поле, которое имеет угловую и осевую составляющие, причем последним целесообразно пренебречь в первом приближении.
Результирующее магнитное поле определяется как сумма внешнего магнитного поля индуктора В1 и собственного магнитного поля канала В2. В силу симметрии индукция результирующего магнитного поля В имеет постоянную величину во всех точках окружности произвольного радиуса r в пределах канала.
Для определения В1 целесообразно принять допущение, что длина индуктора бесконечно длинная. Тогда по закону полного тока, модуль магнитной индукции индуктора
![]() (3)
(3)
Аналогично по закону полного тока, модуль вектора магнитной индукции В2 определяется как
![]() (4)
(4)
Тогда с учетом (3) и (4) можно записать
![]() (5)
(5)
При взаимодействии тока канала и результирующего магнитного поля в канале, как известно, возникает электромагнитная сила f, распределение векторов которого показано на рис. 4. Направление векторов сил определены согласно правилу «левой руки».
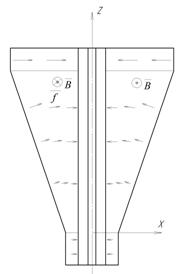
Рис. 4 – Распределение векторов электромагнитной силы в канале
В отдельно взятой точке конической части канала вектор плотности тока ![]() в канале может быть разложен на осевую
в канале может быть разложен на осевую ![]() и радиальную
и радиальную ![]() составляющие (рис. 5).
составляющие (рис. 5).

Рис. 5 – Составляющие векторов электромагнитной силы в точке конической части канала
Осевая составляющая электромагнитной силы стремится двигать рабочее вещество в осевом направлении, таким образом, создавая тягу в канале, а радиальная составляющая электромагнитной силы сжимает его в направлении к центру канала.
Плотность вектора электромагнитной силы определяется по соотношению [6]
![]()
Вектор электромагнитной силы в канале определяется как интеграл от объема канала V2
![]() , (5)
, (5)
где dV2 - элемент объема вещества канала. В цилиндрических координатах ![]() .
.
Целесообразно представить плотность тока в канале и магнитную через составляющие в цилиндрической системе координат.
![]() (6)
(6)
где ![]() - единичные орты в цилиндрической системе координат.
- единичные орты в цилиндрической системе координат.
![]() (7)
(7)
Векторное произведение из выражения (5) можно расписать как [7]
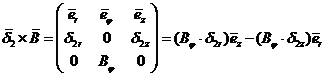
Тогда
Очевидно, что ![]() представляет собой радиальную составляющую электромагнитной силы, а
представляет собой радиальную составляющую электромагнитной силы, а ![]() - ее осевую составляющую. Знак “-“ в радиальной составляющей означает, что силы направлены к центру канала, т.е. являются сжимающими.
- ее осевую составляющую. Знак “-“ в радиальной составляющей означает, что силы направлены к центру канала, т.е. являются сжимающими.
Тогда вектор осевой составляющей электромагнитной силы

Модуль вектора осевой составляющей электромагнитной силы

Аналогично записываются вектор и модуль радиальной составляющей электромагнитной силы

Для проверки адекватности разработанной математической модели было проведено компьютерное моделирование процессов в канале рассмотренного устройства в пакете Comsol Multiphysics. Выбор данной программной среды обусловлен тем, что она имеет широкие возможности задания и гибкой настройки граничных условий между двумя активными частями устройства.
Результаты моделирования в виде распределения векторов электромагнитной силы в канале показан на рис. 6.
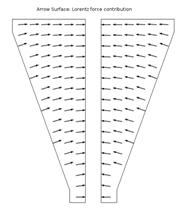
Рис. 6 – Распределение векторов электромагнитных сил в канале (нормализованные вектора)
Результаты проведенного моделирования в целом подтверждают адекватность разработанной математической модели, в частности, определения распределения электромагнитных сил в канале, что является также косвенным доказательством вышеизложенных теоретических положений в ходе математического описания процессов в канале рассмотренного МГД-устройства.
Таким образом, не прибегая к решению сложных дифференциальных уравнений, была разработана математическая модель, которая позволяет описывать процессы в канале МГД-устройства с коническим осесимметричным каналом. Полученные уравнения и выражения могут быть использованы для последующего моделирования и расчета процессов с учетом гидродинамических аспектов функционирования МГД-устройства.
Литература
1. Вольдек А.И. Индукционные магнитогидродинамические машины с жидкометаллическим рабочим телом. – Л.: Энергия, 1970. – 271 с.
2. Кирко И. М., Кирко Г. Е. Магнитная гидродинамика. Современное видение проблем.– М.-Ижевск НИЦ «Регулярная и хаотическая динамика». Ижевский Институт компьютерных исследований, 2009. – 632 с.
3. Исмагилов Ф.Р. Исследование электродинамических демпферов с коническим ротором для управляемых амортизационных систем: Автореф. дис. на соиск.учен.степ.канд.техн.наук. – Уфа, 1981.
4. Меренков Ю.Ф. Взаимодействие пульсирующего магнитного поля с жидкой проводящей средой. - Екатеринбург: УрО РАН, 1998. - 190 с.
5. Черняк В. Г., Суетин П. Е. Механика сплошных сред: Учеб. пособ.: Для вузов. - М.: ФИЗМАТЛИТ, 2006. - 352 с.
6. Мултановский В.В. Курс теоретической физики. Классическая электродинамика: учеб.пособие для вузов / В.В. Мултановский, А.С. Василевский. – 2-е издание., перераб., - М.: Дрофа, 2006. – 348 с.: ил.
7. Никольский В.А. Электродинамика и распространение электроволн. Учебное пособие. – Главная редакция физико-математической науки изд-ва «Наука», М., 1978. - 608 с.: ил.