Исследование влияния уровня развития интеллектуальной транспортной системы на эффективность применения приоритетных полос прерывного действия
Аннотация
Дата поступления статьи: 24.09.2013В статье рассматривается анализ работы приоритетных полос прерывного действия (ПППД) на основе имитационного моделирования. Реализация системы ПППД возможна только в рамках городской интеллектуальной транспортной системы (ИТС). В ряде случаев не всегда имеется достаточное количество компонентов ИТС для функционирования системы ПППД. На основе имитационного моделирования определяется эффективность системы ПППД с минимальным и полным количеством компонентов ИТС. Для сравнения эффективности систем ПППД, моделирование выполнялось для четырех сценариев:
1. Без использования приоритета общественному транспорту.
3. Классическая выделенная приоритетная полоса.
3. Использование системы ПППД с минимальным количеством компонентов ИТС.
4. Использование системы ПППД с полным количеством компонентов ИТС.
По резульатам моделирования сделаны выводы, что минимальная система ПППД заметно уступает полнофункциональной системе ПППД по эффективности, но такая система не требует высокого уровня развития городской ИТС, и может рассматриваться как первый этап внедрения полной системы ПППД.Ключевые слова: моделирование дорожного движения, приоритетная полоса прерывного действия, интеллектуальная транспортная система, управляемые дорожные знаки, детекторы транспорта
Приоритетная полоса прерывного действия является (ПППД) концептуально новым способом организации приоритетных условий для транспортных средств общего пользования [1, 2]. Система ПППД работает по принципу динамического включения и отключения приоритета на полосе, в зависимости от присутствия на участке подвижного состава общественного транспорта [3, 4, 5]. Реализовать систему ПППД без наличия интеллектуальной транспортной системы в городе практически не возможно. В зависимости от числа компонентов ИТС и уровня ее развития можно создать полнофункциональную и минимальную систему ПППД. Схемы моделей для системы ПППД с минимальным и полным количеством компонентов ИТС представлены на рис. 1 и 2.
Особенностью модели показанной на рис. 1 является наличие только трех детекторов. Данные детекторы настроены на распознавание автобусов в общем транспортом потоке. Детектор Д1 отвечает за активацию системы ПППД, а детекторы Д2 и Д3 отвечают за выключение системы ПППД на участке 1 и участке 2 соответственно. В процессе работы данной системы мониторинг транспортного потока не выполняется и реальные транспортные условия не учитываются.
Особенностью модели показанной на рис. 2 является использование 9 детекторов. Детекторы Д1, 2, 3, 4, 5, 6 выполняют мониторинг транспортных потоков, детекторы Д7, Д8, Д9 необходимы только для выключения ПППД на участках 1, 2, 3. На остальных участках выключение выполняют детекторы Д5 и Д6. Главной отличительной чертой полной системы ПППД от минимальной является интеллектуальное определение момента активации.

Рис. 1 Схема модели с ПППД с минимальным количеством компонентов ИТС
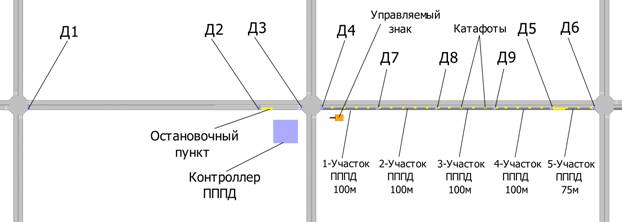
Рис. 2 Схема модели с ПППД с полным количеством компонентов ИТС
Если в минимальной системе для активации ПППД автобусу достаточно проехать через детектор, то в полной системе, логический блок каждую секунду сопоставляет два времени (прогноз подхода автобуса и прогноз освобождения полосы ПППД) и в тот момент, когда они становятся равны друг другу, посылается сигнал на активацию.
Для сравнения эффективности систем ПППД, выполнялось имитационное моделирование для четырех сценариев:
1. Без использования приоритета общественному транспорту.
3. Классическая выделенная приоритетная полоса.
3. Использование системы ПППД с минимальным количеством компонентов ИТС.
4. Использование системы ПППД с полным количеством компонентов ИТС.
Для моделирования использовался пакет AIMSUN, частота движения автобусов составляла 10 ед/ч. В качестве основного параметра эффективности, рассматривалось значение средней скорости автобусов и легковых автомобилей для каждого из сценариев, при различной интенсивности движения [6, 7, 8, 9, 10].
Анализируя параметры эффективности, показанные на рис. 3, можно сделать следующие выводы:
1) Использованием системы ПППД приводит к увеличению скорости движения автобусов во всем диапазоне интенсивностей, за исключением максимальной нагрузки в 2000 авт/ч.
2) Если сравнивать с базовым сценарием, то максимальный прирост скорости составил 9% и 4,5% при использовании полной и минимальной системы ПППД соответственно. При этом максимальное снижение скорости легковых автомобилей составило 6,5% и 11,5% для полной и минимальной системы ПППД соответственно.
3) Приоритетные полосы прерывного действия при низкой нагрузке, практически равны по эффективности классическим приоритетным полосам. Но с ростом интенсивности до 1600 авт./ч их эффективность возрастает более чем на 100% (для двухполосной проезжей части).
4) Полная система ПППД, по сравнению с минимальной системой ПППД приводит к увеличению скорости на 4,5% и менее негативно влияет на скорость легковых автомобилей.
Более высокая эффективность полной системы ПППД обусловлена, прежде всего, боле точным моментом включения. То есть при низкой интенсивности момент включения наступает уже практически перед входом автобуса на секцию ПППД. В случае высокой интенсивности, момент включения наступает намного раньше, поэтому все легковые автомобили успевают освободить приоритетную полосу.
а) легковые автомобили
б) автобусы
Рис. 3 Средняя скорость автобусов и легковых автомобилей для всех сценариев
Таким образом, результаты моделирования показали, что использование системы ПППД приводит к увеличению скорости движения автобусов при минимальном воздействии на общий транспортный поток. Минимальная система ПППД ощутимо уступает полнофункциональной системе ПППД по эффективности, но такая система не требует высокого уровня развития городской ИТС, что очень актуально для российских городов, и может рассматриваться как первый этап внедрения полной системы ПППД.
Литература:
1. Viegas, J. Turn of the century, survival of the compact city, revival of public transport // Bottlenecks in Transportation and the Port Industry. (H. Meersman, Ed). Antwerp, Belgium, 1996. - P.55–63
2. Viegas, J., Lu, B. Widening the Scope for Bus Priority with Intermittent Bus Lanes // Transportation Planning and Technology, 2001. - vol. 24. - P.87-110
3. Zyryanov, V., Mironchuk, А. Simulation study of intermittent bus lane and bus signal priority strategy // Procedia - Social and Behavioral Sciences, 2012. - №48. - P.1464–1471
4. Zyryanov V., Sanamov R. Improving urban public transport operation: experience of Rostov-on-Don (Russia) // International Journal of Transport Economics, 2009. – Т.36. №1 – С.83-96
5. Зырянов, В.В. Мирончук, А.А. Приоритетное движение общественного транспорта: развитие методов организации [Текст] // Транспорт Российской Федерации, 2012. - №3-4 (40-41) – С.22-25
6. Зырянов В.В. Моделирование при транспортном обслуживании мега-событий [Электронный ресурс] // «Инженерный вестник Дона», 2011, Т. 18. № 4. С. 548-551.– Режим доступа:
http://ivdon.ru/magazine/archive/n4y2011/709 (доступ свободный) – Загл. с экрана. – Яз. рус.
7. Зырянов В.В. Методы оценки адекватности результатов моделирования [Электронный ресурс] // «Инженерный вестник Дона», 2013, Т.25. №2. С.132. - Режим доступа:
http://www.ivdon.ru/magazine/archive/n2y2013/1707 – Загл. с экрана. – Яз. рус.
8. Указания по организации приоритетного движения транспортных средств общего пользования. - М.: Транспорт, 1984. - 32 с.
9. Зырянов В.В., Кочерга В.В., Поздняков М.Н. Современные подходы к разработке комплексных схем организации дорожного движения [Текст] // Транспорт Российской Федерации, 2011. - Т.32. №1 – С.54-59
10. Пржибыл, П., Свитек, М. Телематика на транспорте - М.: МАДИ (ГТУ), 2003 - 540с.