Модель развития технических систем управления
Аннотация
Дата поступления статьи: 27.08.2013Рассматриваются технические системы на стадии эксплуатации и исследовании процесса их возможного развития. Обобщённый закон развития технических систем в зависимости от её составляющих позволяет сформировать основные факторы, влияющие на процесс эволюции технической системы и на процесс их модернизации.
Ключевые слова: эволюция, сеть, структура, система, процессы, модификация, цепи, модели, развитие, зависимость.
05.13.01 - Системный анализ, управление и обработка информации (по отраслям)
На стадии эксплуатации существующих технических систем (ТС) необходимо исследовать процесс их возможного развития в будущем и тем самым предусмотреть целесообразность модернизации той или иной ТС. Это обуславливается быстрым моральным старением некоторых элементов системы, а также изменяющимися условиями эксплуатации.
В любую систему, проявляющую свойства развития, можно вводить соответствующие переменные в качестве показателей «роста». Они должны рассматриваться как координаты состояния анализируемой системы, т.к. их значениях аккумулируются определённые влияния [5]. Тем самым конкретную реализацию возможного процесса развития ТС представляется логичным описывать как траекторию z(t)в подходящем пространстве состояний.
Под эволюцией в широком смысле необходимо понимать всякий процесс изменений состояний в системе, которая еще не достигла стационарного (установившегося) состояния [1, 2]. Рассматриваемое в обобщенном смысле стационарное состояние характеризуется фиксированными значениями всех координат или же их квазипериодическими колебаниями [3]. Иногда довольно затруднительно отличить стационарное состояние от «собственного» переходного процесса. Поэтому «эволюция» должна восприниматься как нечеткое понятие [6].
Очевидно, что ТС нетрудно представить в виде определённости структуры графа, в которой все элементарные подсистемы являются его вершинами. Следовательно, появляется возможность каким-то образом описывать элементарные эволюционные процессы в подсистемах и затем использовать связи между вершинами графа, чтобы уяснить эволюцию системы в целом и промоделировать её на ЭВМ. Следует отметить, что в данной ситуации необходимо основательно изучить эволюционные свойства элементарных подсистем, чтобы получить добротную базу для исследования сложной системы посредством моделирования [5].
Элементарные характеристики эволюции логично описывать посредством дифференциальных уравнений следующего вида [6]
![]()
Здесь y+ обозначает влияние, стимулирующее развитие, а y− − влияние, тормозящее его. Это обстоятельство выражается следующими требованиями:
![]() влечёт
влечёт ![]()
![]() влечёт
влечёт ![]()
К автономному поведению системы можно прийти, если y+ и y− жестоко заранее. Описывается оно дифференциальными уравнениями
![]() или
или ![]()
Неравенство ![]() является необходимым и достаточным условием для развивающейся системы.
является необходимым и достаточным условием для развивающейся системы.
Допустим, что при исследовании роста конкретной характеристики ТС пришли к выводу – скорость её роста ![]() пропорциональна достигнутому уровню характеристики х. Значение данной характеристики будет определяться обликом конкретной подсистемы ТС.
пропорциональна достигнутому уровню характеристики х. Значение данной характеристики будет определяться обликом конкретной подсистемы ТС.
Тогда закон, определяющий достигнутое значение характеристики в зависимости, находится из дифференциального уравнения
![]() (1)
(1)
где k – константа, характеризующая (в среднем) отклики потребителя на изменения облика ТС (![]() – относительная скорость роста х).
– относительная скорость роста х).
Решение дифференциального уравнения (1) имеет вид
![]()
где α – постоянная, характеризующая некоторый начальный уровень характеристики х.
При таком подходе нетрудно найти время, необходимое для удвоения характеристики х.
Пусть х0=α при t=0, а уровень х=2х0 достигается при t=T, тогда
![]()
В данном случае время, необходимое для удвоения характеристики х, зависит от её относительной скорости роста.
При резком изменении внешних условий более приемлем закон
![]() ,
,
где кроме стимулирующих факторов имеются и сдерживающие факторы. В этом случае рост характеристик х ограничивается некоторым уровнем b, тогда закон (1) примет вид
![]() (2)
(2)
Относительная скорость роста х становится уже не постоянной, а линейной функцией от х
![]()
Решение уравнения (2) имеет вид
![]()
![]()
![]() (3)
(3)
Выражение (3) представляет собой логическую кривую. В начальные моменты времени, когда х значительно лучше b, кривая практически совпадает с экспонентой ![]() , прямые x=b и x=0 служат асимптотами логической кривой. Точка с координатами
, прямые x=b и x=0 служат асимптотами логической кривой. Точка с координатами ![]() является точкой перегиба.
является точкой перегиба.
Для простоты рассуждений в дальнейшем ограничимся рассмотрением только стимулирующих факторов.
Представляются логичным рассмотреть вначале уравнение с разделением переменных правой части
![]() , (4)
, (4)
где f>0, g≥0 и обе функции непрерывны. Функцию g(y+) для простоты представим следующим образом: g(y+)=g+(t). Тогда дифференциальное уравнение (4) будет описываться конкретной зависимостью
![]() , (5)
, (5)
что облегчит понимание дальнейших преобразований. Относительно функции g можно предположить, что она монотонно возрастает. Решение уравнения (5) имеет вид

где значение С определяется начальным условием F(x0). Предположим, что функция F(x) монотонно возрастает. Отсюда вытекает очень важное заключение: из неравенства ![]() следует другое неравенство
следует другое неравенство ![]() .
.
Рассматривая в общем иерархическую структуру ТС, на i-м её уровне можно выделить элементарную подсистему, развитие которой удовлетворяет уравнению (5). При этом развитие выделенной подсистемы на i-м уровне стимулируется координатами состояния другой подсистемы на (i+1)-м уровне (рис. 1).
Итак, поведение элементарной подсистемы, находящейся на i-м уровне, описывается уравнением
![]() при i = 0, 1, 2….
при i = 0, 1, 2….
считая естественным предположение, что вынуждающие силы развития монотонно убывают снизу вверх. На рис.1 представлена ТС с трёхуровневой структурной схемой и выделена одна «цепочка», по которой определяется влияние стимулирующих факторов развития подсистем (элементов) нижних уровней на ТС.
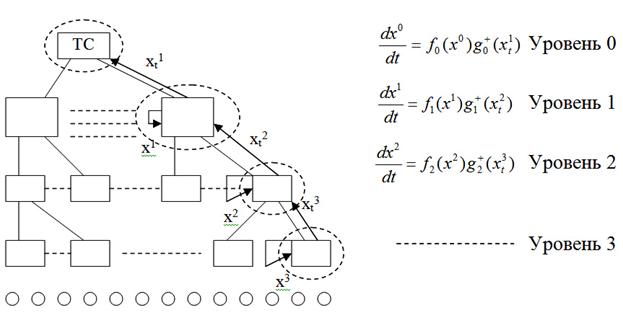
Рис. 1. Структура ТС
В общем виде количество таких «цепочек» будет равно количеству подсистем (элементов) на последнем уровне (в данном случае на третьем уровне). В результате на нулевом уровне, на уровне самой ТС, будет получено такое же количество дифференциальных уравнений
![]() ,
,
решения которых и будут давать обобщённое представление об эволюции системы в любой момент времени t (x0(t)). Таким образом, можно получить эволюционную кривую ![]() самой ТС, которая суммирует в себе все стимулирующие факторы по выделенным «цепочкам» иерархической структуры системы.
самой ТС, которая суммирует в себе все стимулирующие факторы по выделенным «цепочкам» иерархической структуры системы.
Необходимо отметить, что факторы, вынуждающие развитие ТС, монотонно убывают снизу вверх. Если точнее, то предполагается, что скорость увеличения развития падает:
![]() и
и ![]() сходится к
сходится к ![]() при
при ![]()
![]() и
и ![]() сходится к
сходится к ![]() при
при ![]()
Видно, то при увеличении числа уровней прирост развития становится всё меньше и меньше, и, в конце концов, при ![]() стремится к какому-то определённому значению. Следовательно, для начальных значений (в соответствии с рис.2) должно выполняться определённое условие
стремится к какому-то определённому значению. Следовательно, для начальных значений (в соответствии с рис.2) должно выполняться определённое условие
![]() .
.
Таким образом, задав начальное условие на выбранном уровне, можно последовательно определить их на последующих уровнях.
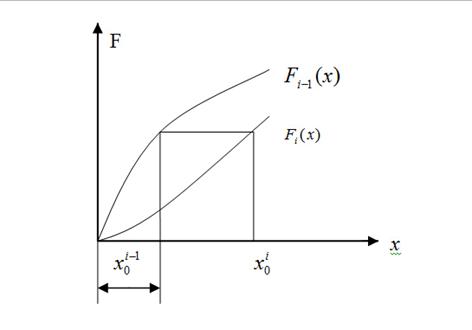
Рис.2. Графики ![]() и
и ![]()
В силу неравенства ![]() ≥
≥![]() следует неравенство
следует неравенство ![]() . Так же и здесь необходимо потребовать сходимость
. Так же и здесь необходимо потребовать сходимость ![]() к
к ![]() при
при ![]() . Эти условия приводят к следующему свойству монотонности: из неравенства
. Эти условия приводят к следующему свойству монотонности: из неравенства ![]() вытекает другое неравенство, т.е.
вытекает другое неравенство, т.е. ![]() .
.
Для практических интерпретаций особый интерес представляет случай, когда иерархическая система обрывается на n-м уровне. Тогда ![]() . Получающееся таким образом
. Получающееся таким образом ![]() целесообразно обозначить через
целесообразно обозначить через ![]() . Теперь можно сравнить обрыв на (n-1)-м уровне с обрывом на n-м уровне. Рассматриваемые условия приводят к следующему результату
. Теперь можно сравнить обрыв на (n-1)-м уровне с обрывом на n-м уровне. Рассматриваемые условия приводят к следующему результату ![]() т.е. значения всех эволюционных процессов на различных уровнях системы могут увеличиваться при добавлении дополнительных уровней иерархии.
т.е. значения всех эволюционных процессов на различных уровнях системы могут увеличиваться при добавлении дополнительных уровней иерархии.
Логично оценить поведение бесконечной цепи при условии сходимости вынуждающих факторов ![]() и
и ![]() . В этом случае, начиная со ступени n, все подсистемы расположенные ниже, имеют приблизительно одинаковое поведение, согласно следующему дифференциальному уравнению
. В этом случае, начиная со ступени n, все подсистемы расположенные ниже, имеют приблизительно одинаковое поведение, согласно следующему дифференциальному уравнению
![]()
с начальным условием ![]() при i=n, n+1…. Не представляет трудности доказательство следующего свойства. С ростом длины цепи из подсистем с одинаковыми динамическими свойствами соответствующие эволюционные процессыxni на уровнях i монотонно сходятся к решению дифференциального уравнения вида
при i=n, n+1…. Не представляет трудности доказательство следующего свойства. С ростом длины цепи из подсистем с одинаковыми динамическими свойствами соответствующие эволюционные процессыxni на уровнях i монотонно сходятся к решению дифференциального уравнения вида
![]() причём
причём ![]() .
.
Таким образом, бесконечная цепь равнозначна системе из несвязанных элементов с модифицированным поведением, соответствующим предельному уравнению (6). На рис.3 приведена эквивалентная структура. Очевидно, что поведение произвольной бесконечной цепи приближенно описывается определённым образом. При i=0, 1, 2, …, n-1 имеются связанные элементы с уравнениями
![]()
и заданными ![]() . Начиная с n-го уровня, имеются автономные процессы, задаваемые как решение уравнения
. Начиная с n-го уровня, имеются автономные процессы, задаваемые как решение уравнения
![]()
с начальным значением x0.
В плане общих рассуждений можно перейти и к частным вопросам, т.е. остановиться на некоторых конкретных примерах моделей развития.
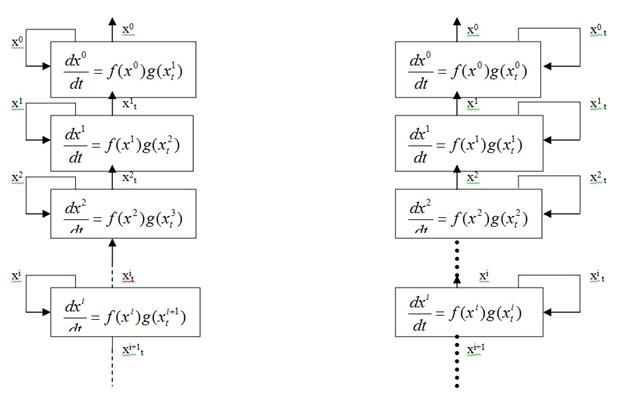
Рис.3. Эквивалентная структура
Модель Гомперца [1]. Это двухуровневая экспоненциальная модель развития с уравнениями вида
![]() ,
, ![]() и
и ![]()
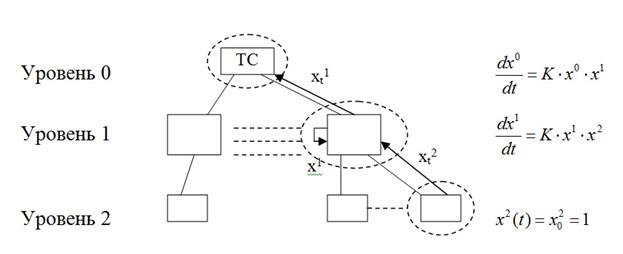
Рис.4. Структурная схема ТС
На основе этой модели можно определить вид обобщённого закона развития большой технической системы, структурная схема которой представлена на рис.4. Видно, что по структурной схеме можно выделить три «цепочки» развития (по количеству элементов на втором уровне). На рисунке показана только одна «цепочка». Решая заданные уравнения, придём к соотношениям
 ,
, ![]() ,
,  ,
, ![]() ,
,
где ![]() (А – постоянная, характеризующая начальный уровень
(А – постоянная, характеризующая начальный уровень ![]() );
);
![]() ,
,  ,
, ![]() ,
,
где ![]() (В – постоянная, характеризующая начальный уровень х0).
(В – постоянная, характеризующая начальный уровень х0).
Так как ТС является большой и её элементы и подсистемы однородны ясно, что развитие по остальным цепочкам будет аналогично. Поэтому обобщённый закон развития ТС будет иметь вид
![]()
Гиперболическая, экспоненциальная и параболическая модели. Это одноуровневые модели роста, которые описываются зависимостью
![]() ,
,
где при k>1 (гиперболическая модель развития); k=1 (экспоненциальная модель развития); k<1 (параболическая модель развития).
Общее решение при k≠1 представляется следующими выражениями
![]() при k>1 (гиперболическое);
при k>1 (гиперболическое);
![]() при k<1 (параболическое);
при k<1 (параболическое);
Здесь ![]() и
и ![]() .
.
Существует ещё целая «гамма» других моделей развития, которые используются на практике. Обобщённый закон развития ТС в зависимости от её составляющих позволяет сформировать основные факторы, влияющие на процесс эволюции ТС, а, следовательно, и на процесс их модернизации.
Литература:
- Гермейер, Ю. В. Введение в теорию исследования операций [Текст] / Ю. В. Гермейер. − М.: Наука, 1991. − 250 с.
- Балашов, Е. П. Эволюционный синтез систем [Текст] / Е. П. Балашов.− М.: Радио и связь, 1985.− 328 с.
- Бочков, А. П. Моделирование развития технических систем [Текст] / А. П. Бочков. − СПб.: МО, 1992. − 106 с.
- Трухаев, Р.И. Модели принятия решений в условиях неопределенности [Текст] / Р. И. Трухаев . - М.: Наука, 1981.-256 с.
- Шегельман, И.Р. К построению методологии анализа и синтеза патентоспособных объектов техники [Электронный ресурс] // «Инженерный вестник Дона», 2012, №3. – Режим доступа: http://www.ivdon.ru/magazine/archive/n3y2012/908 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Злотин, Б. Л. Законы развития и прогнозирования технических систем [Текст] / Б. Л. Злотин, А. В. Зусман. - Кишинев: Прогресс, 1989 г.
- Антонова, А.С. Аксенов К. С. Многокритериальное принятие решений в условиях риска на основе интеграции мультиагентного, имитационного, эволюционного моделирования и численных методов [Электронный ресурс] // «Инженерный вестник Дона», 2012, №4. – Режим доступа: http://www.ivdon.ru/magazine/archive/n4p2y2012/1466 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Бочков, А. П. Модели и методы управления развитием технических систем [Текст] / А. П. Бочков, Д. П. Гасюк, А. Е. Филюстин. – СПб.: Союз, 2003. – 288 с.
- Dynamic Management of Sustainable Development: Methods for Large Technical Systems by: Zigurds Krishans, Anna Mutule, Yuri Merkuryev, Irina Oleinikova 1st Edition. edition (March 1, 2011) | ISBN: 085729055X | 213 pages
- Gudela Grote "Management of Uncertainty: Theory and Application in the Design of Systems and Organizations (Decision Engineering)" Springer | English | 2009-09-28 | ISBN: 184882372X | 192 pages