Совершенствование бортовых систем управления локомотивов на базе технических средств тренажеро-моделирующих комплексов
Аннотация
Дата поступления статьи: 09.06.2014Статья посвящена решению задачи совершенствования бортовых систем управления и автоведения перспективных локомотивов. Авторами предложено для проведения исследований и улучшения технических характеристик средств и методов автоматизации управления использовать тненажер машиниста локомотива. Для этого в статье предложены технические принципы построения и интеграции в составе тренажера аппаратно-программного роботизированного комплекса для автоматического управления краном машиниста
Ключевые слова: Тренажеро-моделирующий комплекс, аппаратно-программый роботизированный комплекс, система управления, автоведение, автоматическое управление тормозами поезда, вычислительный эксперимент
05.13.05 - Элементы и устройства вычислительной техники и систем управления
Повышение уровня автоматизации управления в настоящее время – одно из направлений развития железнодорожного транспорта, которое относится к различным компонентам железнодорожных автоматизированных систем как в нашей стране, так и за рубежом [1, 2]. При этом в нашей стране в числе актуальных задач – совершенствования бортовых систем управления и автоведения локомотивов. Последнее способствует, с одной стороны, повышению безопасности движения, поскольку уменьшается влияние человеческого фактора в сложном технологическом процессе ведения поезда, с другой стороны, во многих случаях, таких как скоростное движение или ведение длинносоставных и тяжеловесных поездов, успешная реализация функций автоматического управления позволяет качественно улучшить условия труда локомотивной бригады; энергоэффективность использования тягового подвижного состава путем снижения расхода электроэнергии и топливных ресурсов; оптимизировать график движения посредством адаптации к динамически изменяющимся условиям среды функционирования.
Требования к системам управления подвижного состава железных дорог изложены в действующих в нашей стране директивных документах, таких как «Стратегия инновационного развития ОАО «РЖД» на период до 2015 года» (Белая книга ОАО «РЖД») и «Программа инновационного развития», технологическая платформа «Высокоскоростной интеллектуальный наземный транспорт», а также технических заданиях на разработку тягового подвижного состава. Эти документы предполагают модульное построение перспективного подвижного состава, когда основные подсистемы (тяги, торможения, безопасности, автоведения и др.) реализуются в виде законченных систем со встроенными электронными устройствами управления и диагностики и взаимодействуют между собой с помощью коммуникационных каналов связи и соответствующих интерфейсов [3]. В результате, современный железнодорожный подвижной состав представляет собой сложную человеко-машинную систему с распределённой многоуровневой иерархического системой управления [4].
Для решения актуальной задачи обучения навыкам эксплуатации таких систем и другой новой техники традиционно используются программно-аппаратные тренажеро-моделирующие комплексы (ТМК) и системы [5, 6]. К числу таких систем могут быть отнесены и тренажеры машиниста локомотива [7], основное назначение которых – имитация поведения объекта, в данном случае, грузового или пассажирского поезда, и отработка навыков управления им. В Ростовском государственном университете путей сообщения такие тренажеры функционируют в составе лабораторно-тренажерного комплекса «Виртуальная железная дорога» (ЛТК «ВЖД») [8].
Вместе с тем, помимо традиционных функций тренажеров, связанных с обучением локомотивных бригад, в условиях постоянной разработки и установки на локомотивы сложных аппаратно-программных комплексов актуальной и сравнительно новой задачей является их использование для испытаний перспективных программно-технических средств автоматизации управления. Другим важным применением становится использование ТМК для проведения научно-исследовательских работ, в частности, для:
- оптимизации алгоритмов и программ систем автоведения;
- отработки реакции сложных человеко-машинных систем на динамически изменяющиеся условия внешней среды;
- испытания аппаратно-программных комплексов управления автоматическими тормозами поезда в тяжелых условиях эксплуатации, например, в условиях переломного профиля пути, затяжных подъемов и спусках;
- моделирования реальных аварийных ситуаций для использования движения грузового поезда, в частности, длинносоставных и тяжеловесных поездов, отработка режимов движения с учетом наличия продольно-динамических реакций в составе, исследование различных скоростных режимов движения по участку;
- совершенствования алгоритмов управления движением поездов, в частности, с точки зрения оптимального расхода электроэнергии при движении по перегону с учетом сложного профиля пути, и, как составляющая этой проблемы, – минимизации потерь кинетической энергии в тормозах при обеспечении безопасности и отсутствия недопустимых продольно-динамических сил в поезде.
Таким образом, ТМК может рассматриваться не только как средство обучения, но и как лабораторная база для проведения научных исследований при решении, в частности, задач оптимизации управления движения поездом в различных условиях, а также инженерных задач по разработке и совершенствовании технических средств автоматизации на железнодорожном подвижном составе.
Известно, что торможение поезда – один из важнейших режимов, возникающих в процессе его движения, который связан как с безопасностью, так и с оптимизацией расхода энергии [9]. Обеспечение безопасности движения связано, в частности, с соблюдением скоростного режима (выполнение ограничений скорости, подтормаживание на «вредном спуске» и т.д.); реакцией на сигналы светофоров - ограничивающих и запрещающих (снижение скорости на желтый и белый, остановочное торможение на красный свет), а также недопущением превышения допустимых ускорений и продольно-динамических усилий в поезде.
Оптимизация расхода энергии при торможении связана со снижением потерь электрической энергии в тормозах. Общие рекомендации заключаются в том, чтобы к «вредному» спуску подходить, по возможности, с минимальной скоростью для того, чтобы минимизировать применение тормозов на самом спуске, а также стремиться не допускать избыточных тормозных усилий, вызывающих в дальнейшем дополнительный расход энергии на разгон поезда [10].
Данные условия могут быть записаны следующим образом: ![]() где
где ![]() - значения продольно-динамических реакций;
- значения продольно-динамических реакций;![]() - максимально допустимые значения продольно-динамических реакций;
- максимально допустимые значения продольно-динамических реакций; ![]() - ускорение поезда,
- ускорение поезда, ![]() - максимально допустимое ускорение;
- максимально допустимое ускорение; ![]() - потери энергии в тормозах [7].
- потери энергии в тормозах [7].
В качестве лабораторной базы для решения указанных задач коллективом авторов был выбран тренажер грузового локомотива, входящий в состав ЛТК «ВЖД». Рассмотрение различных вариантов его использования выявило необходимость разработки дополнительных программно-технических средств, с помощью которых может быть осуществлено автоматическое управление тормозной системой поезда. Возможно два основных пути решения этой проблемы. Первый предполагает разработку роботизированного механического устройства, имитирующего воздействия машиниста (руку машиниста) на органы управления – кран машиниста локомотива и осуществляющего переключение позиций крана машиниста посредством перемещения его рукоятки в нужное положение. Второй вариант предполагает электронное управление клапанами тормозной системы, как это реализуется в системах автоведения УСАВП [11] или при использовании электронного крана машиниста типа № 130 (230). Однако, управление клапанами предполагает внесение изменений в электрическую и пневматическую схему, а электронные краны машиниста в настоящее время используются только на нескольких новых типах подвижного состава. Поэтому было принято решение о создании роботизированного аппаратно-программного комплекса (АПК) для автоматического управления краном машиниста, которое включает в себя механическое устройство, имитирующее воздействия машиниста на органы управления – кран машиниста локомотива. Такой подход позволит использовать устройство при проведении исследований как на тренажерах ЛТК «ВЖД», так и на локомотивах, оборудованных кранами машиниста № 394 и 395 без изменения схемы и установки дополнительного штатного оборудования. Механическое устройство конструктивно устанавливается на кран машиниста локомотива с целью реализации управляющих воздействий для установки рукоятки крана машиниста в одно из семи возможных положений. Механическое устройство включает шаговый двигатель и блок управления к нему, получающие управляющие команды от контроллера и обеспечивающие формирование соответствующих управляющих воздействий на шаговый двигатель, являющийся исполнительным устройством. Роль управляющего контроллера может выполнять компьютер с программным обеспечением, включенным в состав тренажера. Анализ предметной области и возможных технических решений позволил определить общую структуру АПК. Его функциональная схема приведена на рис. 1. Согласно ей требуется реализация 4-х основных компонентов: механического устройства, непосредственно, осуществляющего переключение рукоятки крана машиниста; шагового двигателя и блока управления, входящих в привод механического устройства; управляющего компьютера, осуществляющего расчёт управляющих воздействий и формирование команд шаговому приводу. В результате рассмотрения различных вариантов построения АПК было принято решение о необходимости разработки и производства оригинального механического устройства, для чего были привлечены специалисты опытно-экспериментального завода РГУПС (рис. 2).
Рис. 1 - Функциональная схема АПК

Рис. 2 – Механическое устройство для управления краном машиниста
Параллельно с разработкой аппаратных средств был реализован программный вариант управления тренажером, предполагающий создание специализированной клиентской программы и модуля автоведения. Причем клтентская программа служит для реализации программного протокола связи между программным обеспечением «Тренажера машиниста» и модулем автоведения, а последний – для расчета на основе получаемых данных управляющих воздействий по управлению краном машиниста для тренажера. Функциональная схема такого решения для одной рабочей станции на основе так называемого механизма «сокетов» операционной системы Windows показана на рис. 3.

Рис. 3 – Функциональная схема взаимодействия программных средств для моделирования автоматического управления краном машиниста
В результате, используя данный подход, появляется возможность осуществлять вычислительные эксперименты на базе персонального компьютера. Интерфейс программного комплекса представлен на рис. 4.
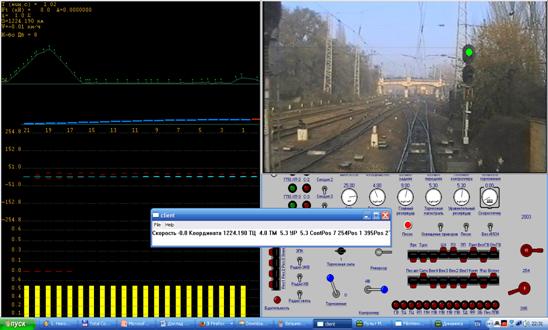
Рис. 4 – Интерфейс программы-тренажера машиниста
В качестве примера использования данного подхода приведем задачу исследования выбора начальной скорости при движении по участку Батайск-Каменоломни, соответствующей вредному спуску в районе станции «Аксай». Вредный спуск предполагает необходимость выполнения торможения. Как указывалось выше, оптимизация расхода энергии при движении на вредном спуске заключается в том, чтобы минимизировать использование тормозов при выполнении ограничений скорости. С помощью описанного программного обеспечения было осуществлено моделирование движения поезда на выбеге при различной начальной скорости и получены значения скоростей в каждой точке пути, что позволяет в зависимости от действующих в данный момент значений ограничений определить возможность бестормозной траектории движения, а также зону включения тормозов для обеспечения режима подтормаживания. Вычислительные эксперименты проводились для поезда с 60 вагонами, графики скорости разгона до 80 км/ч приведены на рис. 5.
Рис. 5 – График скорости поезда при движении по вредному спуску на выбеге
Представленные данные могут быть использованы для построения графика движения поезда, включая определение места начала применения торможения при различных скоростях в начале спуска.
Работа выполнена при поддержке гранта ФГБОУ ВПО РГУПС
Литература:
- А. Capara, I. Galli, P. Toth. Solution of the Train Platform Problem // Transportation Science. 2011. – 45 (2), P.246-257.
- Wong, K. K. and Ho, T. K., Coast control for mass rapid transit railways with searching methods// IEE Proceedings-Electric Power Applications, vol. 151, 2004, pp. 365.
- Шепилова Е.Г., Юренко К.И. Интеллектуальная бортовая информационно-управляющая сеть перспективных локомотивов [Текст] // Труды первой научно-технической конференции «Интеллектуальные системы управления на железнодорожном транспорте ИСУЖТ-2012» г. Москва, МГУПС (МИИТ) 15-16 ноября 2012, - Ч.3. – С.228-232.
- Юренко К.И., Фандеев Е.И., Сапунков А.Н. Эволюция бортовых систем управления подвижного состава железных дорог [Текст] // Труды VIII международной научно-практической конференции «Научная индустрия европейского континента – 2012», Прага, «Наука и образование», 27 ноября - 5 декабря 2012. – Том 25. Технические науки. – С. 44-49.
- Юренко, К.И., Фандеев Е.И., Нефедов В.В. Программно-технические и тренажеро-моделирующие комплексы для разработки, испытаний, управления и обслуживания современных локомотивов [Электронный ресурс] // «Инженерный Вестник Дона», 2013, № 3. - Режим доступа: http://www.ivdon.ru/magazine/archive/n3y2013/1826 (доступ свободный) - Заглав. с экрана. – Яз. рус.
- Долгова Е.В., Файзрахманов Р.А., Курушин Д.С., Федоров А.Б., Хабибулин, А.Ф., Шаронов А. А. Архитектура мобильного тренажера погрузочно-разгрузочного устройства [Электронный ресурс] // «Инженерный вестник Дона», 2012, №4 (часть1). – Режим доступа: http://www.ivdon.ru/magazine/archive/n4p1y2012/1327 (доступ свободный) - Заглав. с экрана. – Яз. рус.
- Ройзнер, А.Г. Тренажеры нового поколения: особенности, возможности, перспективы [Текст] // Локомотив. №5, 2012. – С. 17-19.
- Верескун В.Д., Колесников В.И., Сухорукова Н.Н. Учебно-исследовательский лабораторный комплекс «Виртуальная железная дорога [Текст] // Тp. 3-й междунаp. науч.-техн. конф. «Компьютеpное моделиpование−2002». — СПб.: СПбГПУ, 2002. — С. 203−209.
- Вождение поездов: Пособие машинисту [Текст] / Р.Г. Черепашенец, В.А. Бирюков, В.Т. Понкрашов, А.Н. Судиловский; Под. Ред. Р.Г. Черепашенца. – М.: Транспорт, 1994. – 304 с.
- Осипов С.И., Осипов С.С., Феоктистов В.П. Теория электрической тяги: Учебник для вузов ж.-д. транспорта [Текст] / Под. ред. С.И. Осипова. – Маршрут, 2006. – 436 с.
- Донской А.Л., Завьялов Е.Е. Системы автоведения и регистрации для электровозов пассажирского движения [Текст] // Железнодорожный транспорт. - №9. 2005.- С. 9-12.