Моделирование двухосевого микромеханического сенсора угловых скоростей и линейных ускорений LR-типа
Аннотация
Дата поступления статьи: 19.03.2013Рассмотрены полученные результаты моделирования микромеханического сенсора угловых скоростей и линейных ускорений.
Ключевые слова: микросистемная техника, элементная база, моделирование, сенсор, гироскоп, акселерометр
В настоящее время одним из перспективных направлений развития микросистемной техники является разработка и исследование многоосевых функционально интегрированных микромеханических сенсоров угловых скоростей и линейных ускорений [1-5].
Функционально интегрированных микромеханические сенсоры угловых скоростей и линейных ускорений находят широкое применение в современных технических средствах различного назначения: от специализированных изделий аэрокосмической техники и оборонных систем до бытовых приборов, таких как сотовые телефоны и игровые платформы нового поколения [1-6].
На основе предложенного метода [7] разработана конструкция интегрального двухосевого микромеханического сенсора угловых скоростей и линейных ускорений LR-типа, защищенного патентом РФ на изобретения [8].
Интегральный сенсор содержит подложку, неподвижные латеральные и плоские электроды емкостных преобразователей перемещений, неподвижные гребенчатые электроды электростатических приводов, опоры, подвижный гребенчатый электрод электростатического привода, упругие балки, внутреннюю рамку, инерционную массу и торсионные балки [8].
На основе разработанных уравнений движения [7] микромеханического сенсора и моделей жесткостей их упругих подвесов, предложенных критериев согласованности частот колебаний в режимах движения и чувствительности, и критериев оценки электродов электростатических приводов и емкостных преобразователей перемещений [9] было разработано параметризуемое VHDL-AMS описание микромеханического сенсора угловых скоростей и линейных ускорений LR-типа.
На рис. 1-2 представлены результаты моделирования сенсора LR-типа при изменении угловых скоростей и линейных ускорений в полном динамическом диапазоне.
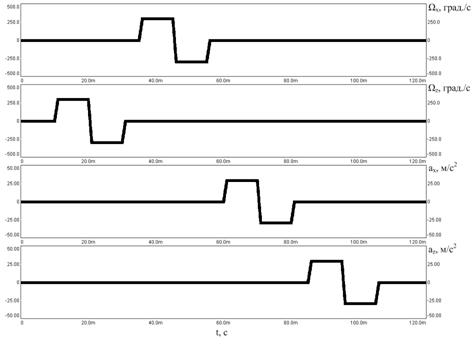
Рис. 1. – Изменения угловых скоростей и линейных ускорений, действующих на микромеханические сенсоры, в полном динамическом диапазоне
Как видно на рис. 1, длительность воздействия угловых скоростей и линейных ускорений составляет по 20 мс, длительности переднего и заднего фронтов – по 1 мс. Последовательность действия на сенсор угловых скоростей и линейных ускорений выбрана таким образом, чтобы не было их перекрытия по одной и той же оси чувствительности.
Как видно на рис. 2, при подаче управляющих напряжений чувствительные элементы сенсоров начинают совершать противофазные вынужденные колебания с амплитудой 7,7 мкм. Время установления вынужденных колебаний составляет 5 мс.
При действии угловых скоростей Ωх, Ωz внутренние рамки и инерционные массы совершают противофазные колебания вдоль осей Z и Х, соответственно. Амплитуда колебаний внутренних рамок пропорциональна величине внешнего воздействия и составляет 464 нм по оси Х. Угол вращательных колебаний инерционных масс под действием угловой скорости, направленной вдоль оси Z, составляет 0,060. Направление действия угловых скоростей будет определять фазу колебаний внутренних рамок и инерционных масс сенсоров.
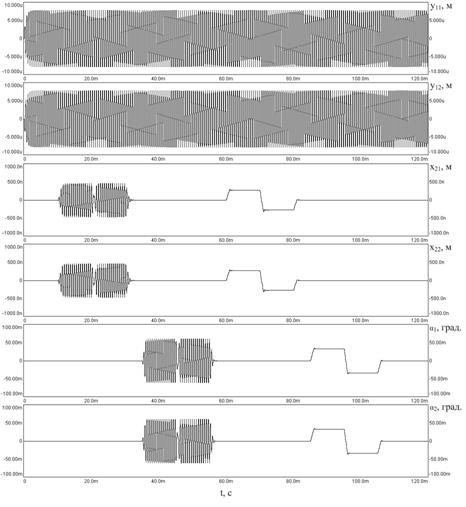
Рис. 2. – Перемещения подвижных электродов электростатических приводов, внутренних рамок и инерционных масс сенсора
в полном динамическом диапазоне
При действии линейного ускорения ах внутренние рамки совершают синхронные перемещения вдоль осей Х с амплитудой 274 нм. При действии линейного ускорения аz инерционные массы совершают синхронное вращение перпендикулярно плоскости подложки. Амплитуда вращения инерционных масс пропорциональна величине действующего воздействия и составляет 0,030. Направление действия линейных ускорений будет определять фазу перемещений внутренних рамок и углов поворота инерционных масс. Время действия переходных процессов по оси чувствительности Х – менее 2 мс, а оси Z – менее 1 мс.
Как видно из результатов моделирования, предложенная конфигурация конструкции сенсора угловых скоростей и линейных ускорений LR-типа с двумя осями чувствительности позволяет выделить сигналы, несущие информацию исключительно о колебаниях элементов сенсора под действием угловых скоростей и о перемещениях чувствительных элементов под действием линейных ускорений по двум осям чувствительности [11].
Полученные результаты моделирования могут использоваться при проектировании функционально интегрированных микромеханических сенсоров угловых скоростей и линейных ускорений с двумя осями чувствительности.
Работа выполнена при финансовой поддержке Министерства образования и науки Российской Федерации (шифр проекта «8.5757.2011»).
Литература:
- Распопов, В.Я. Микромеханические приборы [Текст]: учебное пособие / В.Я. Распопов. – Тула: Тульский государственный университет, 2007. – 400 с.
- Варадан, В. ВЧ МЭМС и их применение [Текст] / В. Варадан, К. Виной, К. Джозе.– М.: Техносфера, 2004.– 528с.
- Вернер, В.Д. Современные тенденции развития микросистемной техники [Текст] / В.Д. Вернер, П.П. Мальцев, А.А. Резнев, А.Н. Сауров, Ю.А. Чаплыгин // Нано- и микросистемная техника.– 2008.– №8.– С. 2-6.
- M.Palaniapan. Integrated surface micromachined frame microgyroscopes [Text].– University of California, Berkeley, 2002.– 168 p.
- Xie, H. Integrated microelectromechanical gyroscopes [Text] / H. Xie, G. K. Fedder // Journal of aerospace engineering.– 2003.– №4.– p. 65-75.
- Лысенко, И.Е. Интегральный сенсор угловых скоростей и линейных ускорений [Электронный ресурс] // Инженерный вестник Дона, 2010, №3. – Режим доступа: http://ivdon.ru/magazine/ (доступ свободный) – Загл. с экрана.– Яз. рус.
- Лысенко, И.Е. Теория микромеханических сенсоров угловых скоростей и линейных ускорений LR-типа [Текст] // Известия ЮФУ. Технические науки.– Таганрог: Изд-во ТТИ ЮФУ, 2009.– №1.– С.123-128.
- Пат. 2300773 РФ, МКИ7 G 01 P 15/08. Интегральный микромеханический гироскоп [Текст] / Б.Г. Коноплев (Рос. Федерация), И.Е. Лысенко (Рос. Федерация) – № 2006103063/28; Заяв. 02.02.2006; Опубл. 10.06.2007, Бюл. № 16; Приоритет 02.02.2006. – 10 с.: ил. УДК 621.3.049.77.
- Лысенко, И.Е. Критерий оценки жесткости пальцев гребенок электродов микроэлектромеханических преобразователей [Текст] / И.Е.Лысенко, О.А.Ежова, А.В.Лашков // Фундаментальные исследования.– 2012. – №11.– С. 636-639.
- Лысенко, И.Е. Моделирование интегрированного внутреннего упругого подвеса микромеханического устройства [Электронный ресурс] // Инженерный вестник Дона, 2010, №3. – Режим доступа: http://ivdon.ru/magazine/ (доступ свободный) – Загл. с экрана.– Яз. рус.
- Лысенко, И.Е. Интегральные сенсоры угловых скоростей и линейных ускорений LR-типа на основе углеродных нанотрубок [Электронный ресурс] / И.Е. Лысенко, А.В. Лысенко // Инженерный вестник Дона, 2012, №4. – Режим доступа: http://ivdon.ru/magazine/ (доступ свободный) – Загл. с экрана.– Яз. рус.